Robust Autonomy to elicit full potential of mobile robots and spacecrafts
Hey there, I am an Embedded Software Engineer at Amazon Robotics. I am part of the advanced programs group, developing embedded GNC algorithms for Amazon's fleet of fulfillment automation robotic platforms. Before joining Amazon Robotics, I received my PhD from Texas A&M University in Aerospace Engineering. My research was focused on robust autonomy, sensor fusion, and proximity operations of autonomous agents. I have been affiliated with LASR lab and was being advised by Professors Manoranjan Majji and John Junkins
.
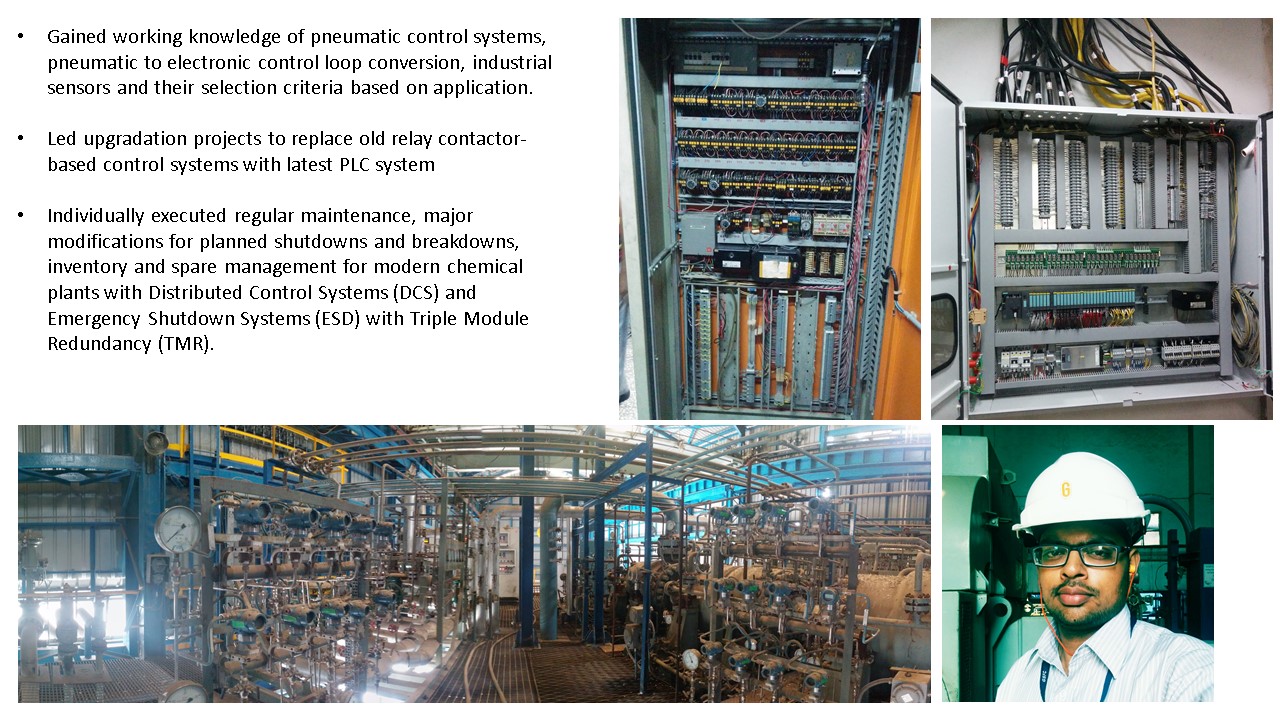
My background includes aerospace GNC, process control, industrial measurement, and optimal control. I have six years of industry experience in process control, embedded systems, robotic manipulation, V&V, and large-scale software development.
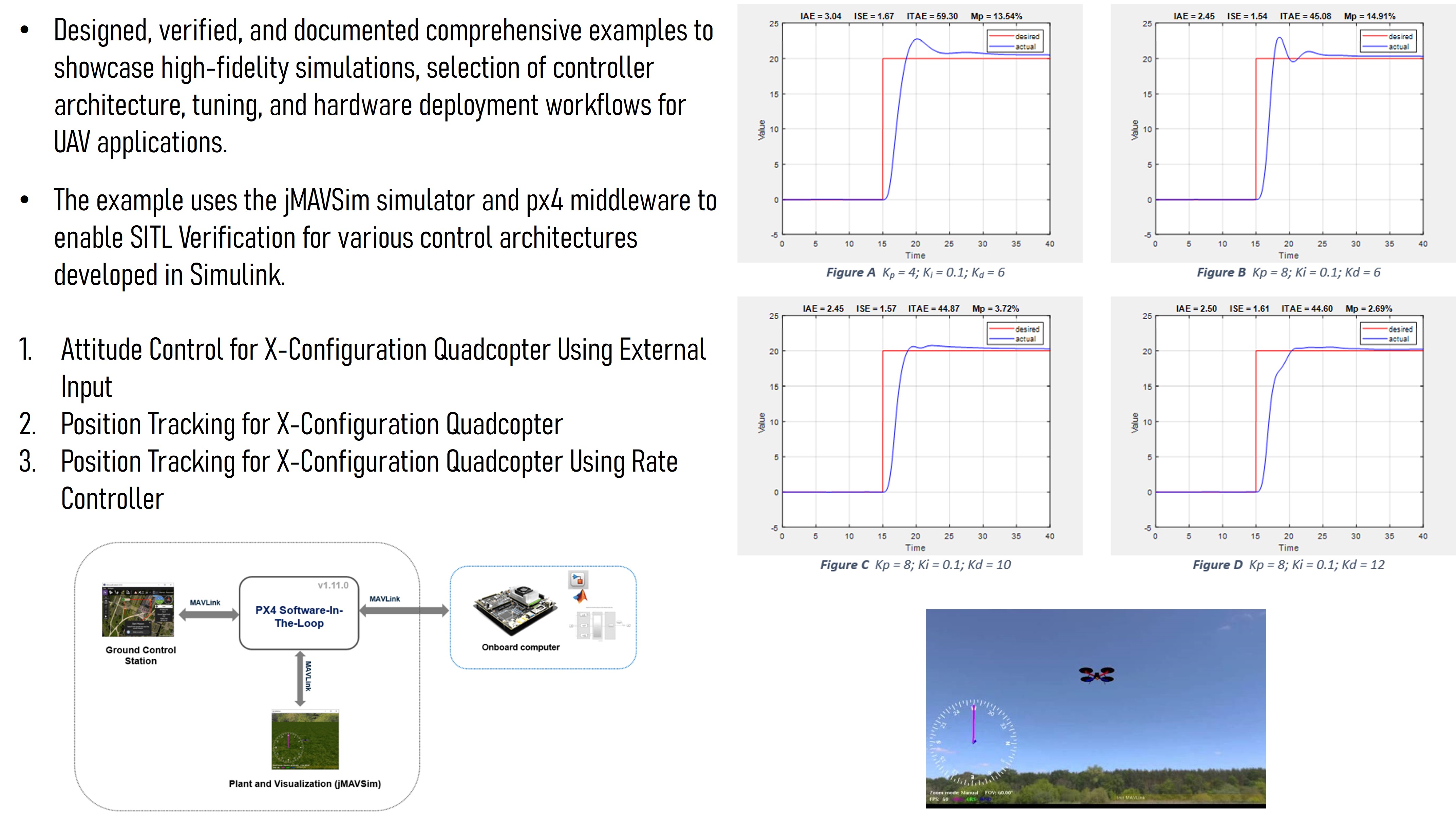
During my time at MathWorks, I developed end-to-end V&V tools to enable SIL, HIL, and autocode generation for various robotics manipulators. Some of my contributions that are currently offered as individual products and workflow examples
Orbital Stability and Optimal Landing Strategy on a Uniformly Rotating Homogeneous Rectangular Parallelepiped.
Course Project
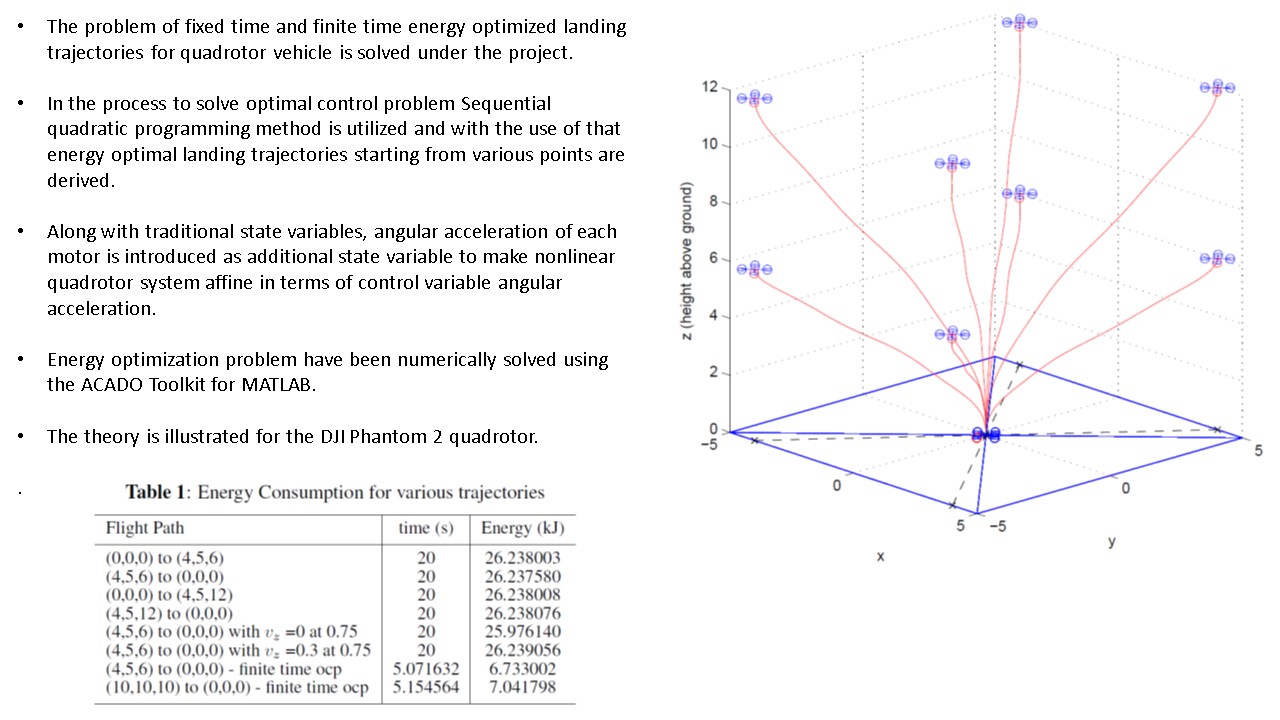
Fixed time and finite time energy optimized landing trajectories for quadrotor vehicle in constrained 3-D environment.
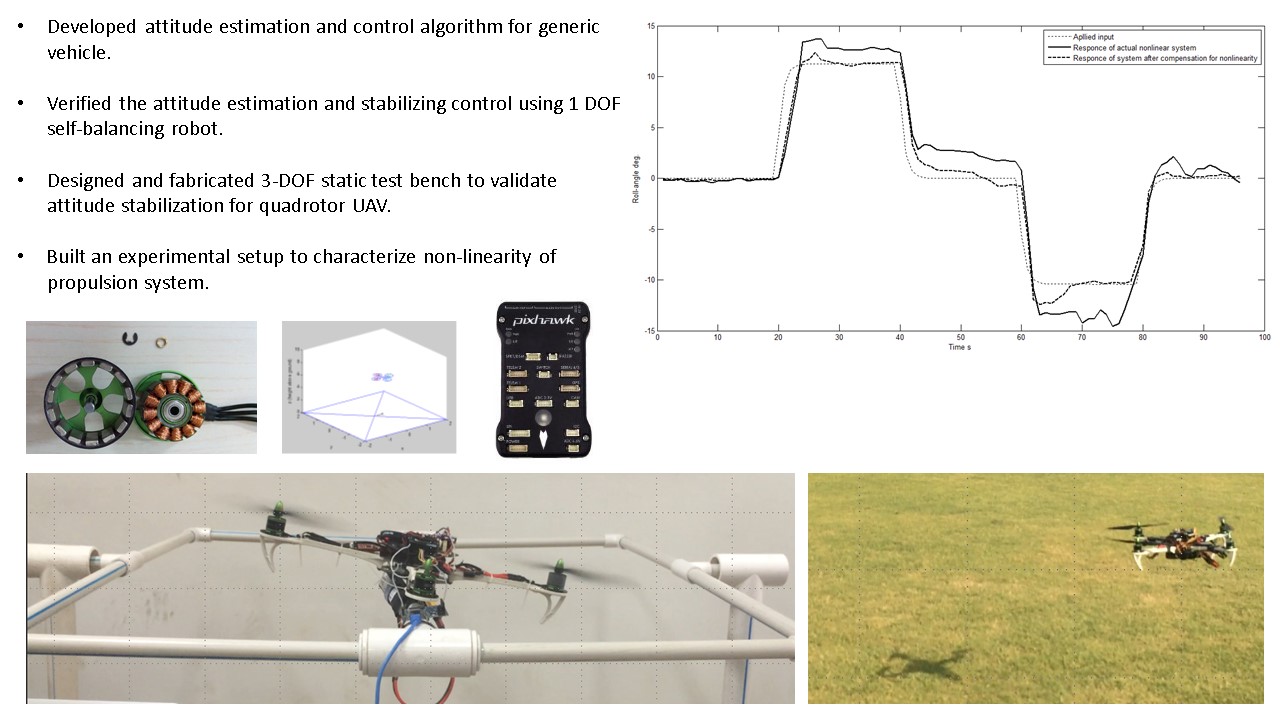
Development of the controller for Quadrotor UAV
Minor research project
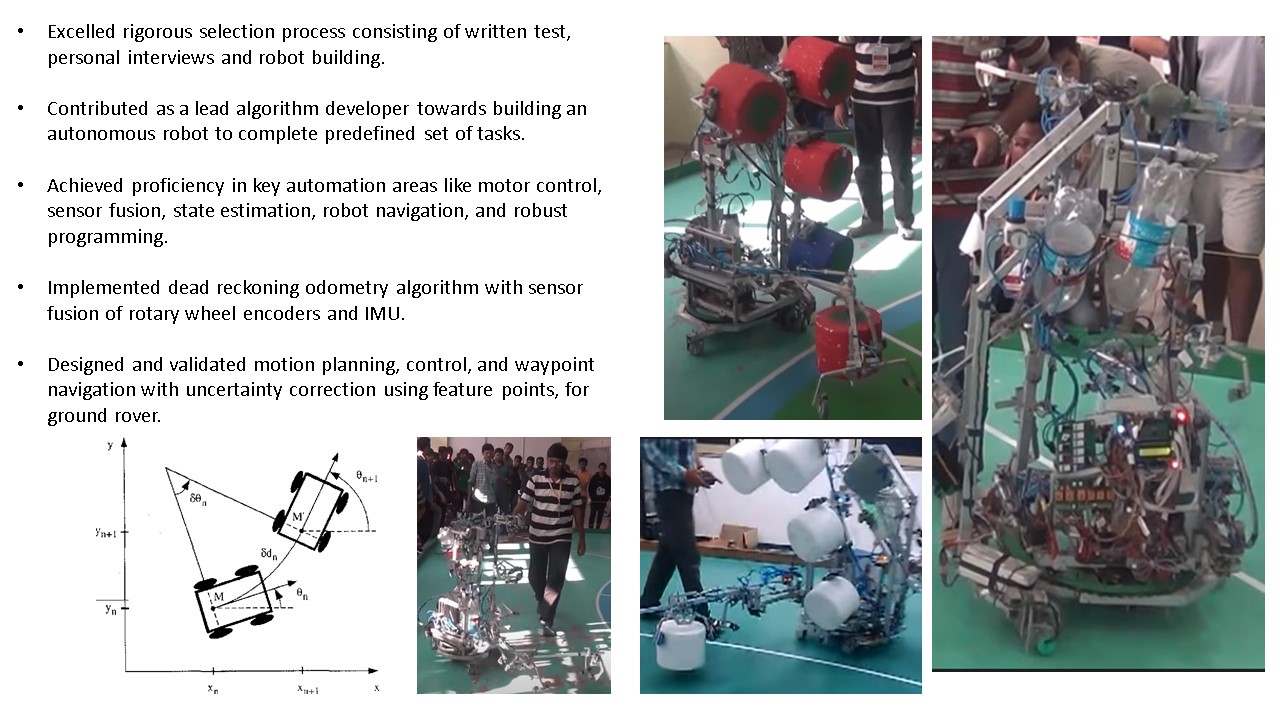
Intelligent Ground Control Vehicle, IIT Kanpur
Technical Mentor, GNC.
Team Robocon, Nirma University
GNC Lead, robot 1.
DIY Projects
RC QuadCopter UAV, Fixed Wing Aircraft and more
Publications as the primary author
Parikh, D., Wijk D.v., Majji, M., Safe Multi-agent Satellite Servicing with Control Barrier Functions, Presented at 47th Rocky Mountain AAS Guidance, Navigation and Control (GN&C) Conference, Breckenridge, CO.https://arxiv.org/pdf/2502.10480
The use of control barrier functions under uncertain pose information of multiple small servicing agents is analyzed for a satellite servicing application.
The application consists of modular servicing agents deployed towards a tumbling space object from a mothership.
Relative position and orientation of each agent is obtained via fusion of relative range and inertial measurement sensors.
The control barrier functions are utilized to avoid collisions with other agents for the application of simultaneously relocating servicing agents on a tumbling body.
A differential collision detection and avoidance framework using the polytopic hull of the tumbling space object is utilized to safely guide the agents away from the tumbling object.
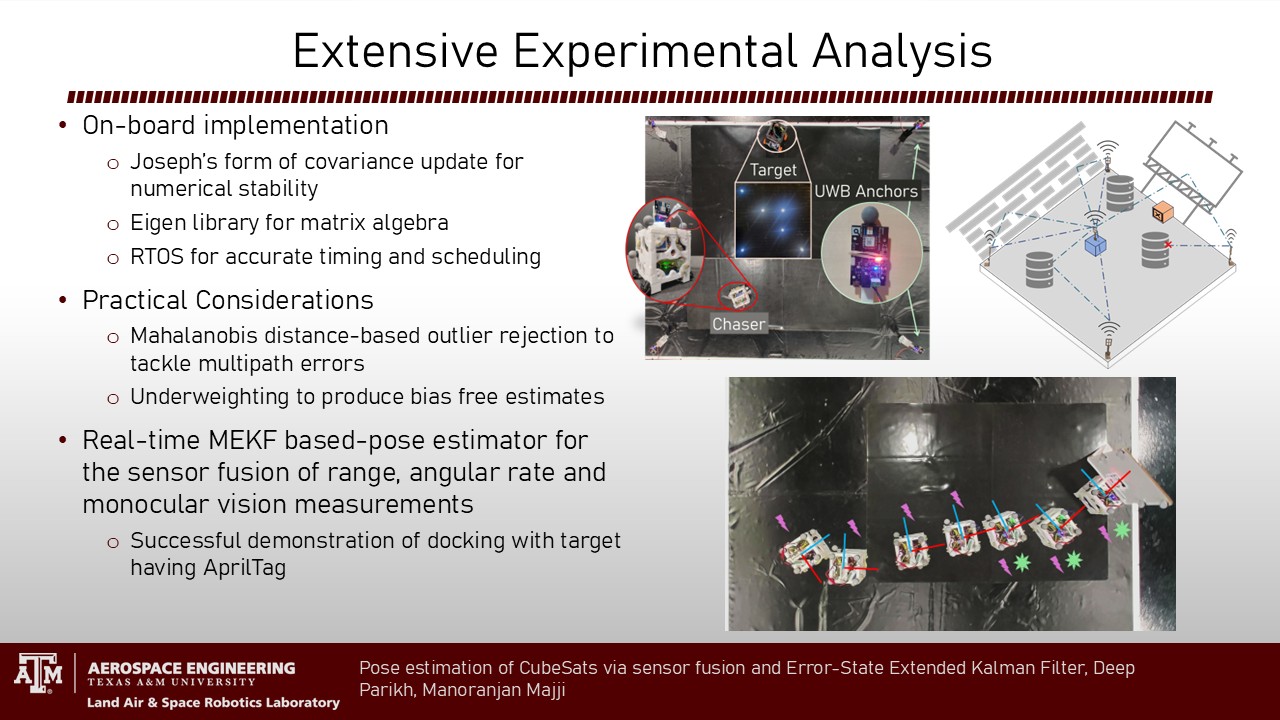
Parikh, D., Khowaja A.H., Majji, M., Robust Proximity Operations using Probabilistic Markov Models, Under review for ICRA 2025.https://arxiv.org/pdf/2409.19062
A Markov decision process-based state switching is devised, implemented, and analyzed for proximity operations of various autonomous vehicles.
The framework contains a pose estimator along with a multi-state guidance algorithm. The unified pose estimator leverages the extended Kalman filter for the fusion of measurements from rate gyroscopes, monocular vision, and ultra-wideband radar sensors.
It is also equipped with Mahalonobis distance-based outlier rejection and underweighting of measurements for robust performance.
The use of probabilistic Markov models to transition between various guidance modes is proposed to enable robust and efficient proximity operations.
The framework is validated through an experimental analysis of the docking of two small satellites and the precision landing of an aerial vehicle.
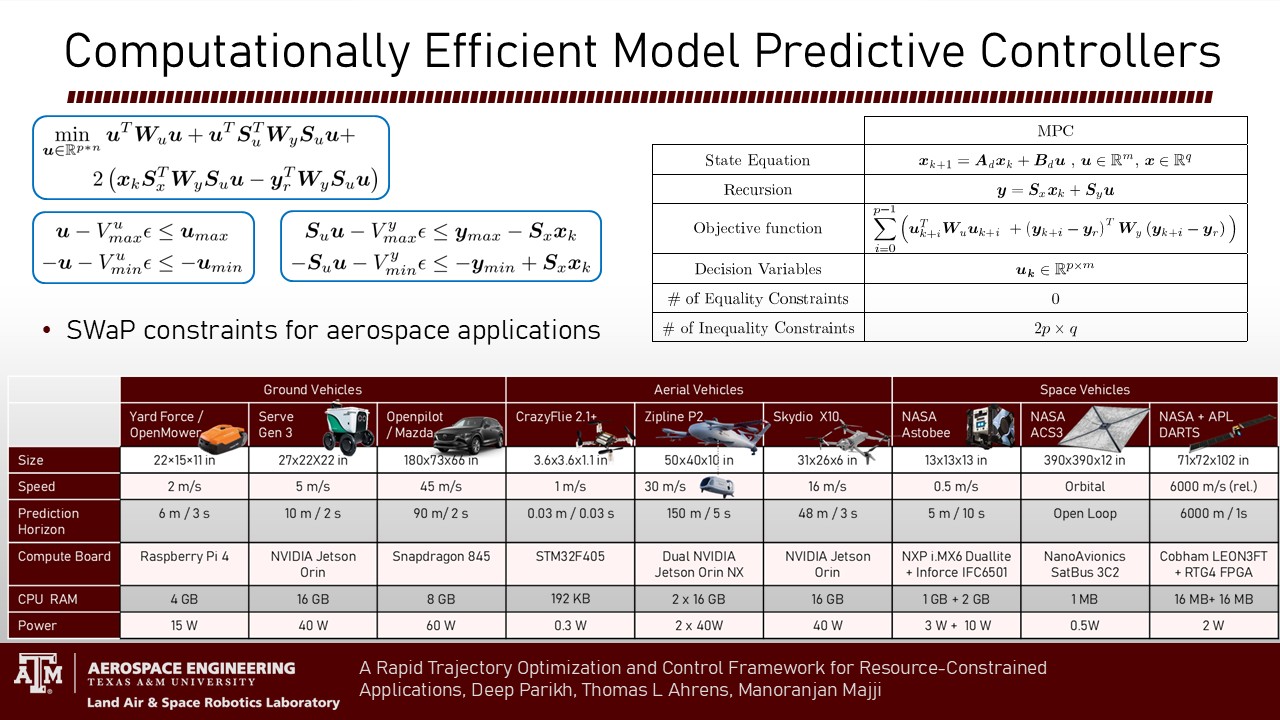
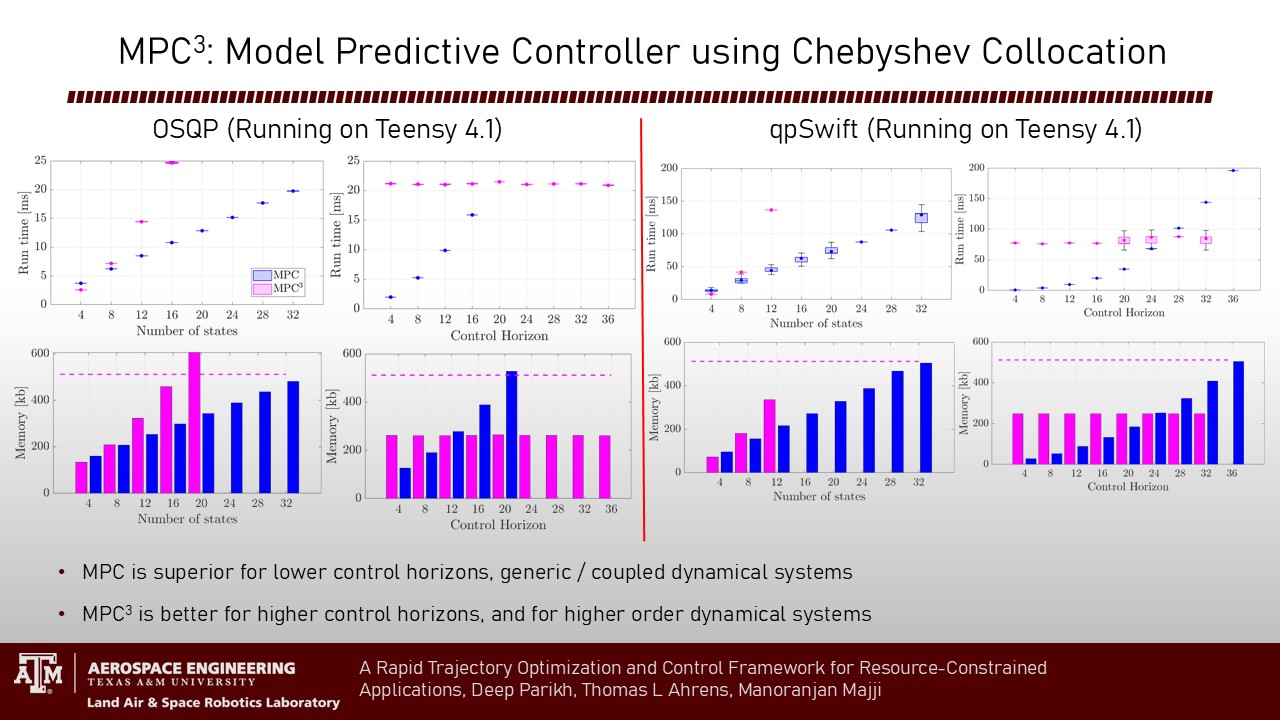
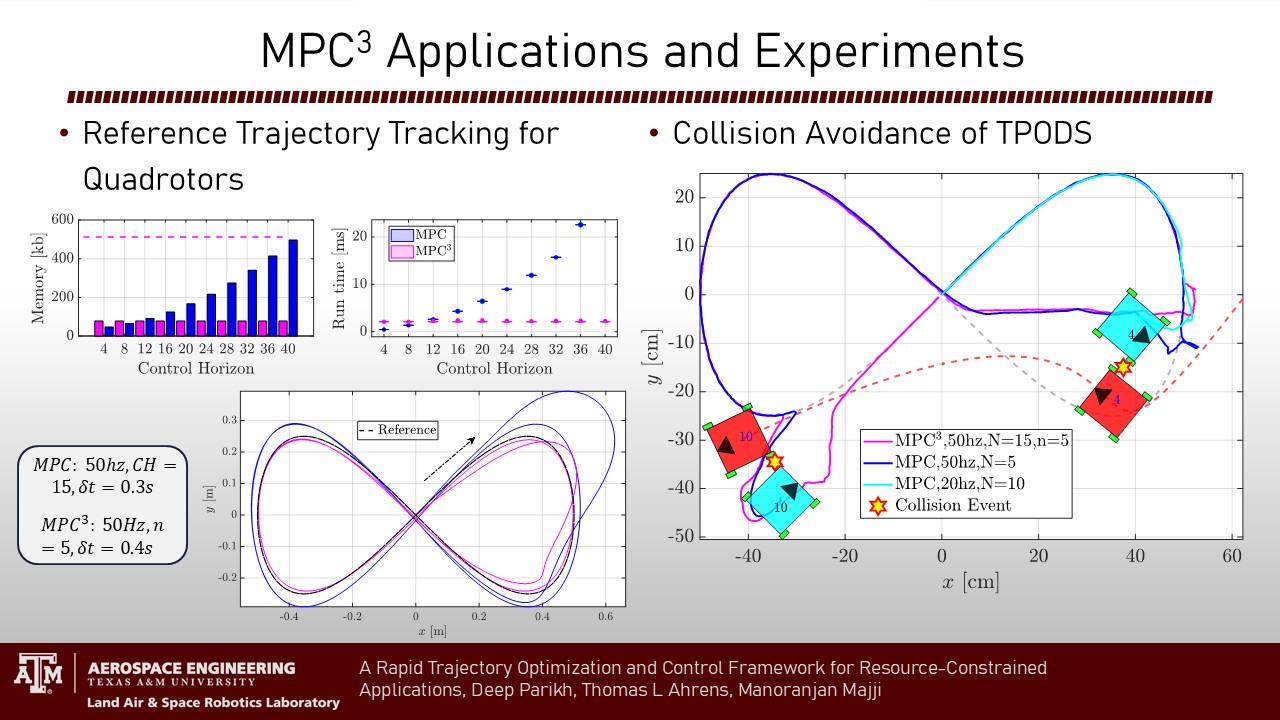
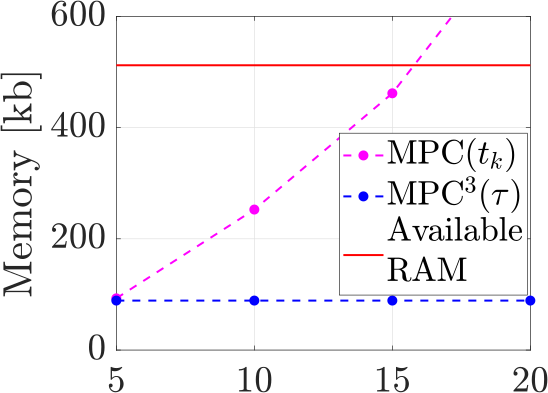
Parikh, D., Ahrens T.L., Majji, M., A Rapid Trajectory Optimization and Control Framework for Resource-Constrained Applications, ACC 2025.https://arxiv.org/pdf/2410.07413
This paper presents a computationally efficient model predictive control formulation that uses an integral Chebyshev collocation method to enable rapid operations of autonomous agents.
By posing the finite-horizon optimal control problem and recursive re-evaluation of the optimal trajectories, minimization of the L2 norms of the state and control errors are transcribed into a quadratic program.
Control and state variable constraints are parameterized using Chebyshev polynomials and are accommodated in the optimal trajectory generation programs to incorporate the actuator limits and keepout constraints.
Differentiable collision detection of polytopes is leveraged for optimal collision avoidance.
Results obtained from the collocation methods are benchmarked against the existing approaches on an edge computer to outline the performance improvements.
Collaborative control scenarios involving multi-agent space systems are considered to demonstrate the technical merits of the proposed work.
TPODS Docking with Collision Avoidance and MPC
Computational performance of MPC3 Generated on Teensy 4.1 development board
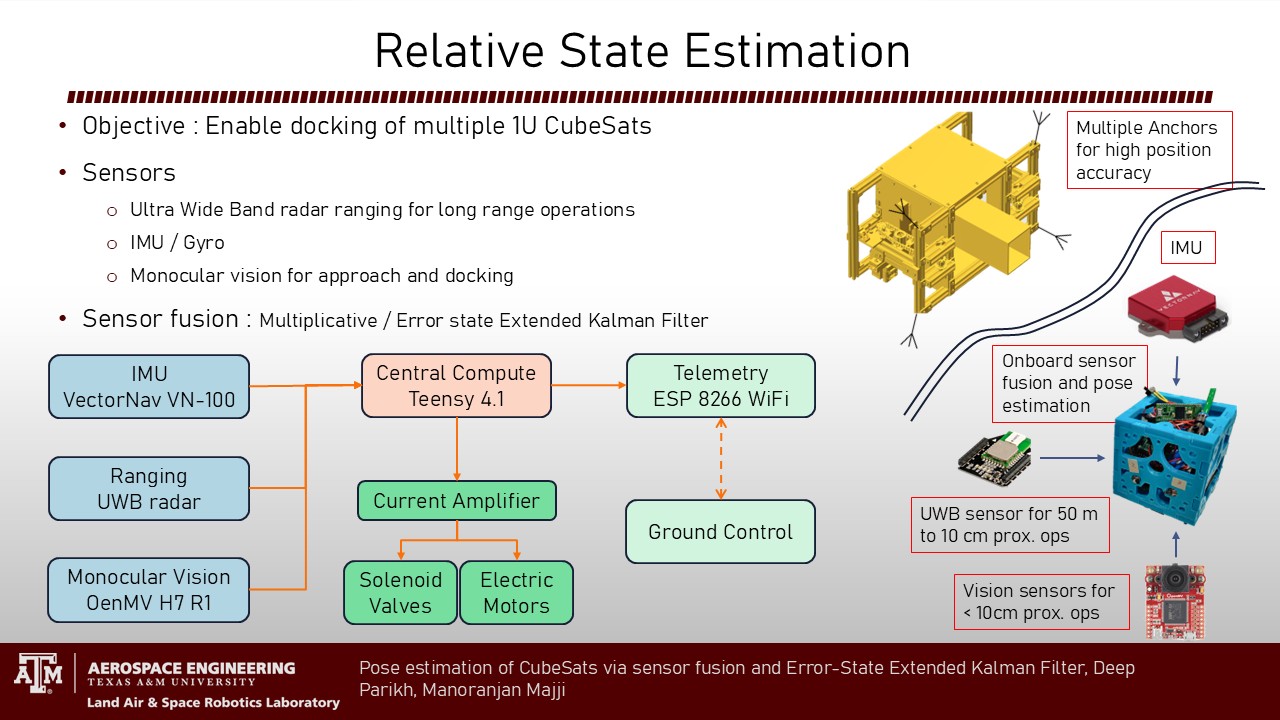
Parikh, D., Majji, M., Pose estimation of CubeSats via sensor fusion and Error-State Extended Kalman Filter, 2024 AAS Guidance, Navigationand Control Conference, Breckenridge, Coloradohttps://arxiv.org/pdf/2409.10815
Pose estimation technique based on error-state extended Kalman that fuses angular rates, accelerations, and relative range measurements is presented in this paper.
Anunconstrained dynamic model with kinematic coupling for a thrust-capable satellite is considered for the state propagation, and a pragmatic measurement model of the rate gyroscope, accelerometer, and an ultra-wideband radio are leveraged for the measurement update.
The error-state extended Kalman filter framework is formulated for pose estimation, and its performance has been analyzed via several simulation scenarios.
An application of the pose estimator for proximity operations and scaffolding formation of CubeSat deputies relative to their mother-ship is outlined.
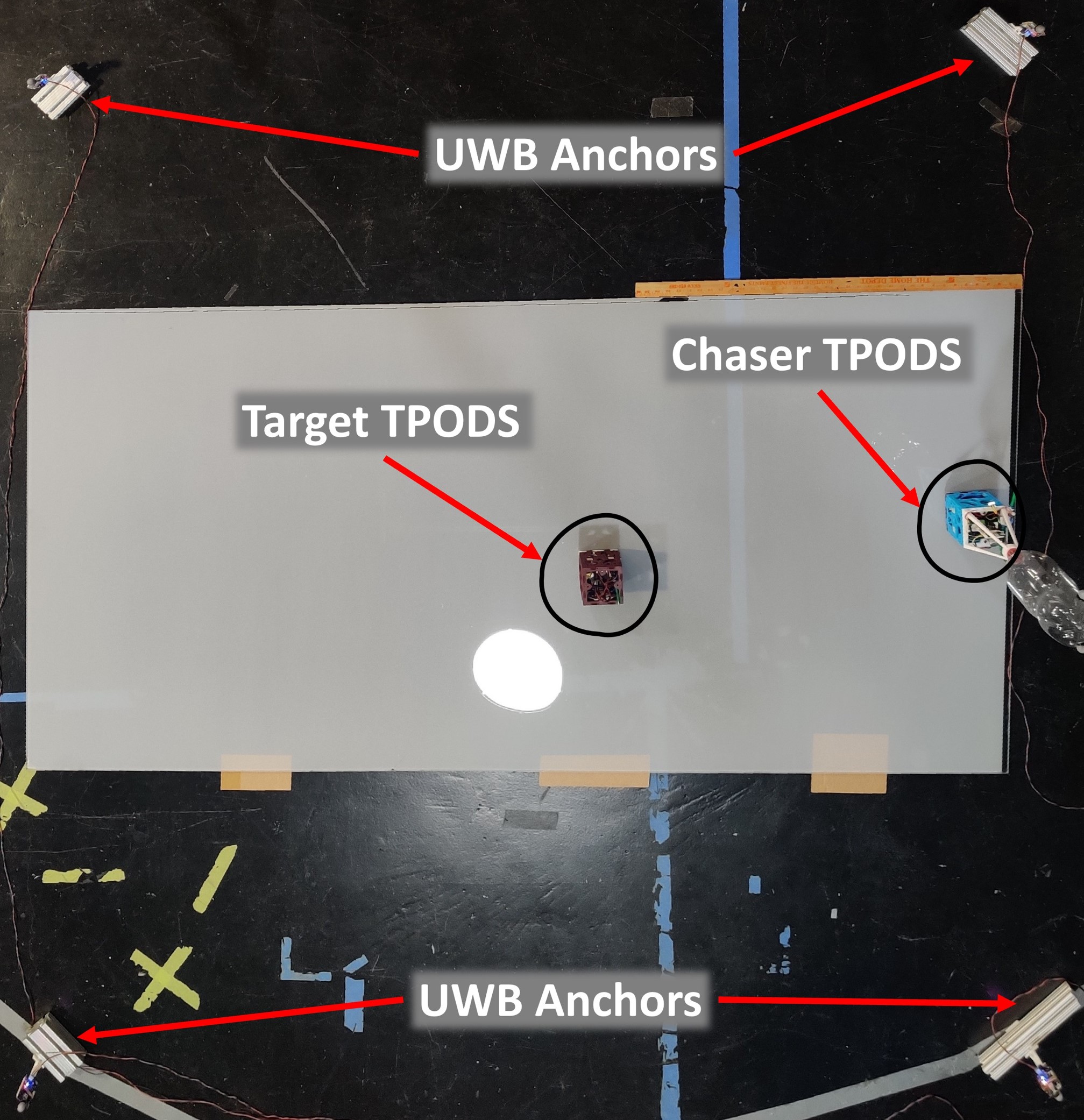
The performance of the error-state extended Kalman filter is demonstrated using experimental analysis consisting of a 3-DOF thrust cable satellite mock-up, rate gyroscope, accelerometer, and ultra-wideband radar modules.
TPODS LOS Guidance with UWB and IMU Pose Estimation
Experimental Setup
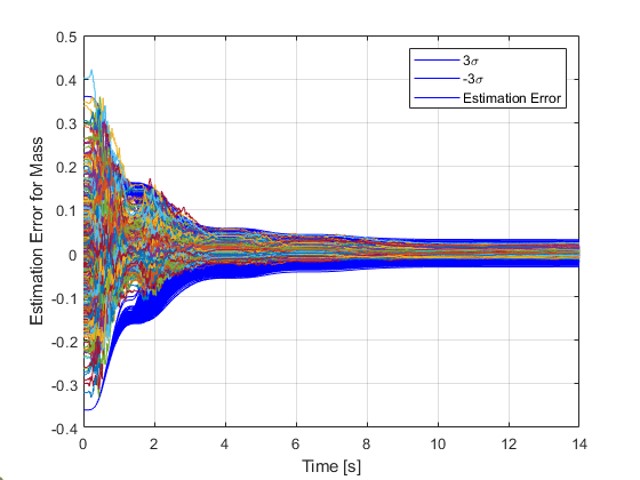
Parikh, D., Majji, M., Estimation Of Inertial Properties Of A Rigid Structure Maneuvered By Satellite Modules, 2023AAS/AIAA Astrodynamics Specialist Conference, Big Sky, Montana https://arxiv.org/pdf/2409.09658
This study makes advancements to devise, implement and validate an algorithm for the estimation of inertial parameters of a rigid structure, to be maneuvered with the help of Transforming Proximity Operations and Docking Service (TPODS) satellite modules.
The primary contribution of this activity is observability analysis to infer a conducive input sequence for estimating the inertial parameters.
For the experimental validation of proposed estimation algorithm, real-time pose measurements are logged through the VICON® motion capture system and the recorded data is utilized to assess the performance of the estimation algorithm to predict mass and moment of inertia of an isolated TPODS module.
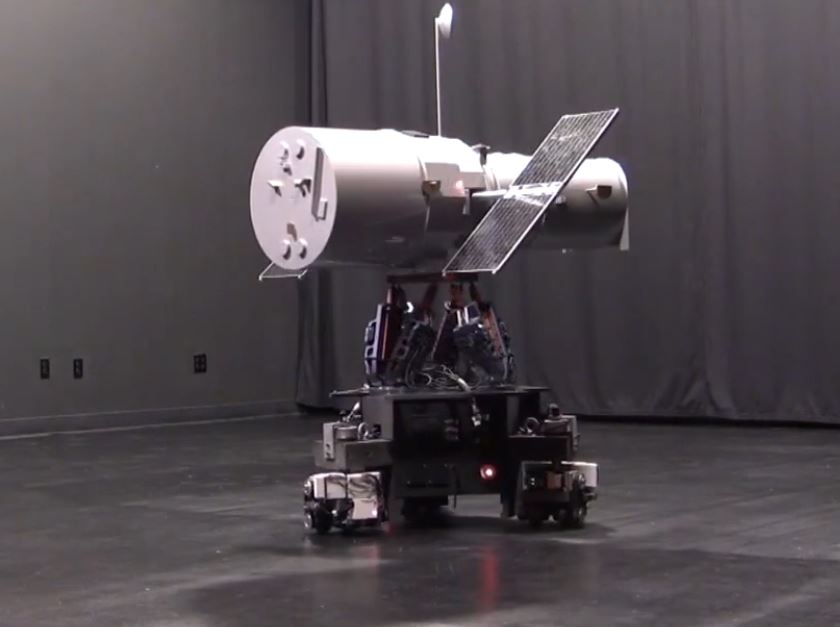
TPODS Moving Semi-rigid structure
Monte-Carlos Analysis for mass estimation
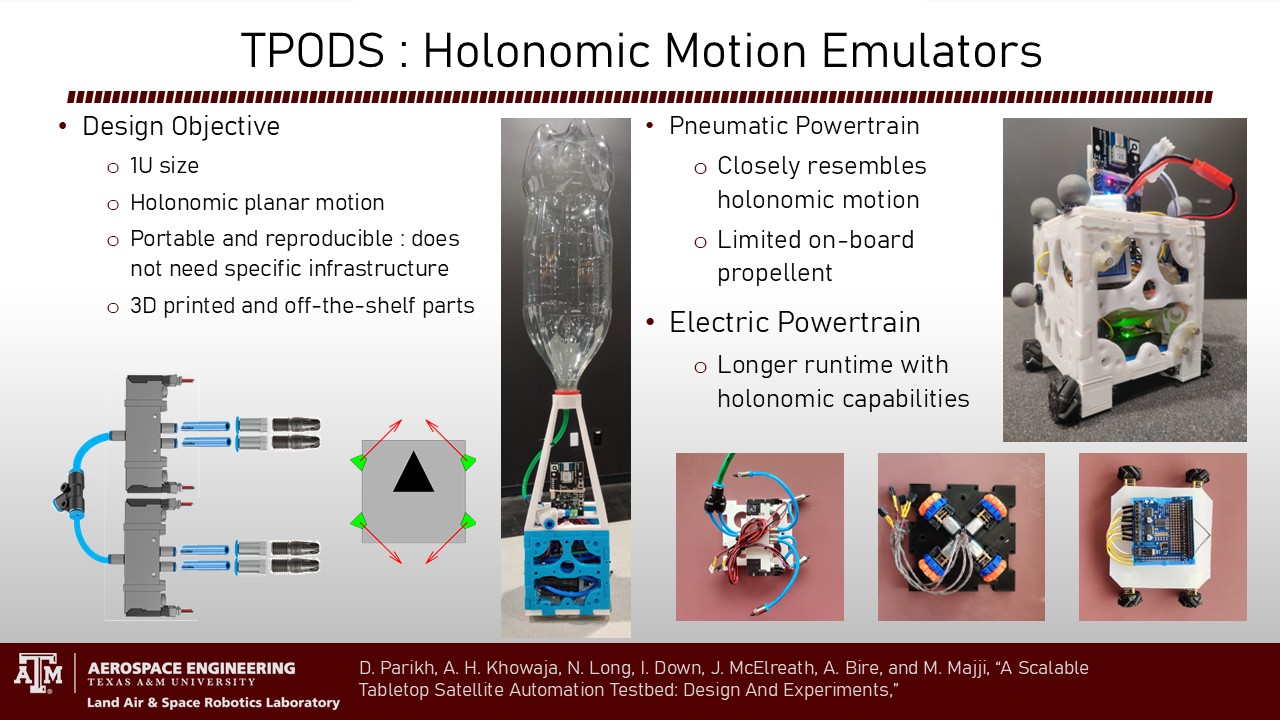
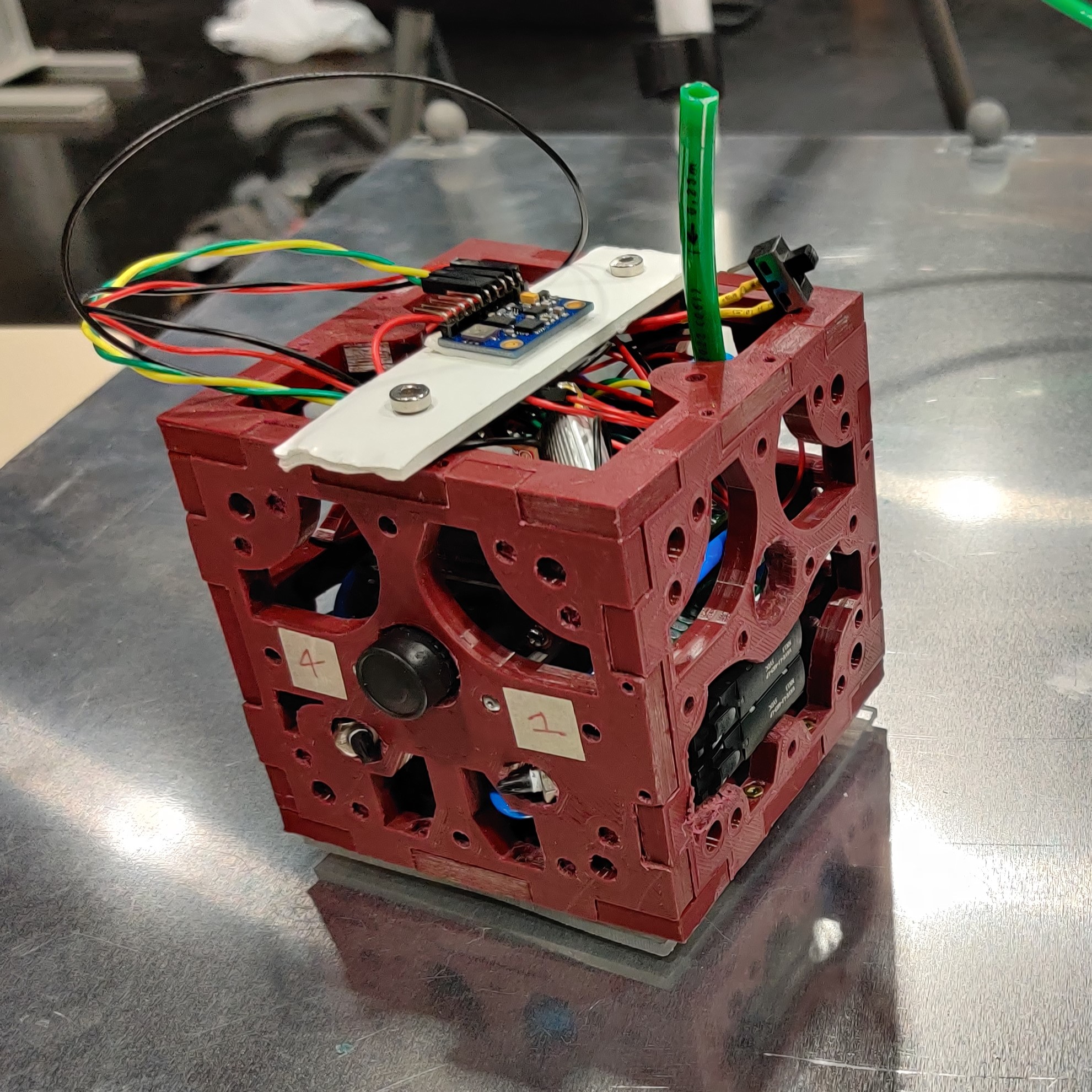
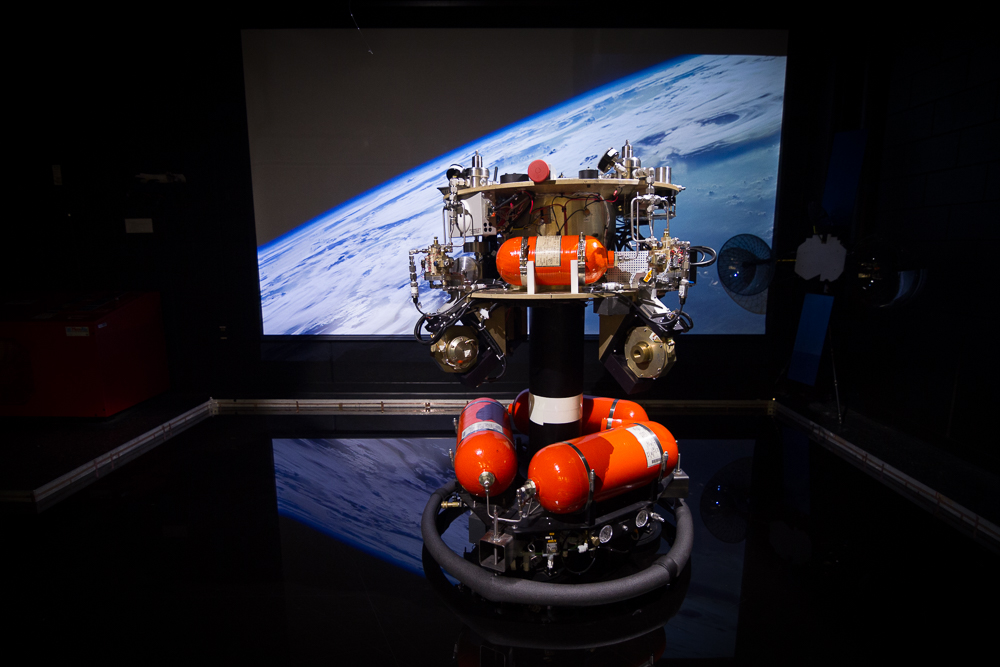
Parikh, D. et al. A Scalable Tabletop Satellite Automation Testbed: Design And Experiments, 2023 AAS Guidance, Navigationand Control Conference, Breckenridge, Coloradohttps://arxiv.org/pdf/2409.09633
TPODS MK-III
TPODS Thruster System
Parikh, D., Tewari, A. Optimal Landing Strategy on a Uniformly Rotating Homogeneous Rectangular Parallelepiped. J Astronaut Sci 68, 120–149 (2021). https://doi.org/10.1007/s40295-020-00243-y
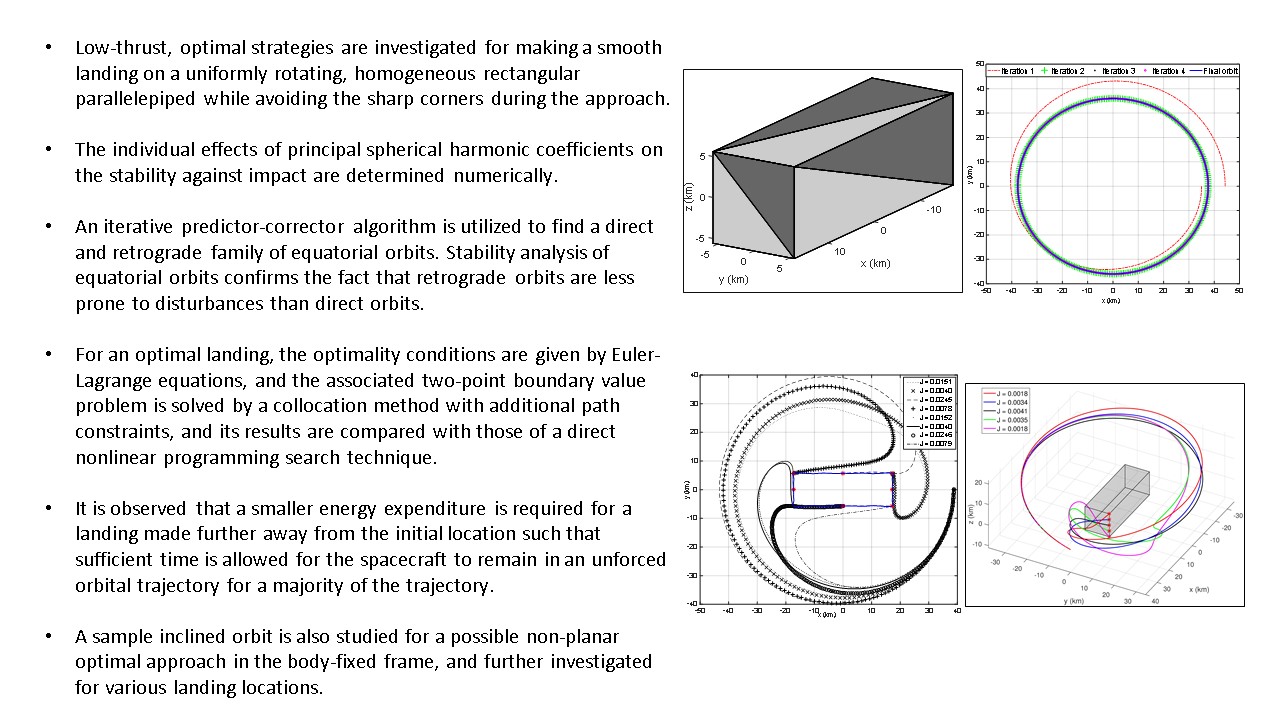
Low-thrust, optimal strategies are investigated for making a smooth landing on a uniformly rotating, homogeneous rectangular parallelepiped while avoiding the sharp corners during the approach.
The individual effects of principal spherical harmonic coefficients on the stability against impact are determined numerically.
An iterative predictor-corrector algorithm is utilized to find a direct and retrograde family of equatorial orbits.
Stability analysis of equatorial orbits confirms the fact that retrograde orbits are less prone to disturbances than direct orbits.
For an optimal landing, each approach trajectory begins from a stable equatorial orbit, and terminates at a prescribed landing point.
The optimality conditions are given by Euler-Lagrange equations, and the associated two-point boundary value problem is solved by a collocation method with additional path constraints, and its results are compared with those of a direct nonlinear programming search technique.
A sample inclined orbit is also studied for a possible non-planar optimal approach in the body-fixed frame, and further investigated for various landing locations.
Direct approach
Retrograde approach
Inclined Direct approach
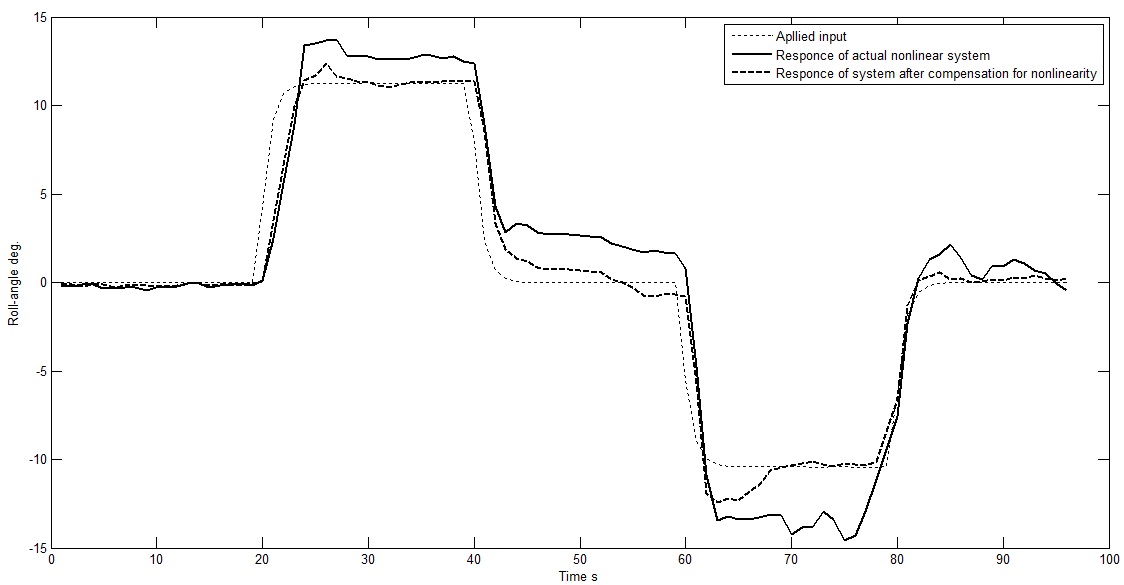
Parikh, D., Patel, J., & Barve, J., Quad-copter UAV BLDC Motor Control: Linear v/s non-linear control maps. Nirma University Journal of Engineering and Technology, 4(1), 25. 2015.[PDF]
Comparision of response
Relevant Courses
Foundational
Celestial Mechanics
Flight Dynamics
Space Dynamics-I
Dynamics and Vibration
Introduction to Aerospace Engg
Continuum Mechanics
Spacecraft Dynamics and Control
Cryogenics
Digital Computing
Embedded systems
Control system components
Microprocessor
Microcontroller and its apllication
Digital Signal Processing
Digital system design
Sensor Modeling
Applied Electronics
Industrial Electronics
Linear Electronics
Electrical and Electronic measurement
Measurement Technique 1 & 2
Classical Control
Control theory
Process control 1 & 2
Control system design
Modern Control
Non linear and digital control
Optimal Space Flight Control
Flight Stability and Control
Nonlinear and Adaptive Control
Optimal Spacecraft Attitude & Orbital Maneuvers
Modern Control of Aerospace System
Adaptive Control
Estimation Theory
Autonomous Navigation
Modern Control of Aerospace System
HONORS & AWARDS
Best Poster - Third Position, Poster Session, National Academy of Engineering Regional meeting Synmposium on Space and Time. April, 2024
Graduate Excellence Fellowship Award Fall 2024, Texas A & M University.
Graduate Excellence Fellowship Award Spring 2023, Texas A & M University.
American Society of Indian Engineers and Architects (ASIE) 2022 Scholarship.
Academic Excellence Awards for the year 2018, Indian Institute of Technology Kanpur.
Academic Excellence Awards for the year 2017, Indian Institute of Technology Kanpur.
Departmental Gold medal, Instrumentation and Control Engineering batch 2014, Nirma University.
Best Poster - Third Position
National Academy of Engineering Regional meeting Synmposium, Texas A & M University.
ASIE 2022 Scholarship
American Society of Indian Engineers and Architects Annual Holiday Event, Houston.
Departmental Gold medal
Instrumentation and Control Engineering batch 2014, Nirma University.
Convocation
Indian Institute of Technology Kanpur, 2019.
Motivation
A NASA report on fatigue in ISS crew members states that crewmembers spend a considerable amount of time performing inspections and routine maintenance of ISS. In this area, automation could substantially reduce the frustration of crewmembers regarding wasting valuable time in orbit. Furthermore, in the distance, there are more than a million debris objects between 1 cm to 10 cm orbiting the earth for many years[1]. As an aerospace control engineer, I feel that the lack of robust autonomy in modern spacecraft and congestion in space has the potential to thwart future space exploration attempts. However, they can be mitigated by leveraging advancements in aerospace guidance, navigation, and control, emphasizing proximity operations.
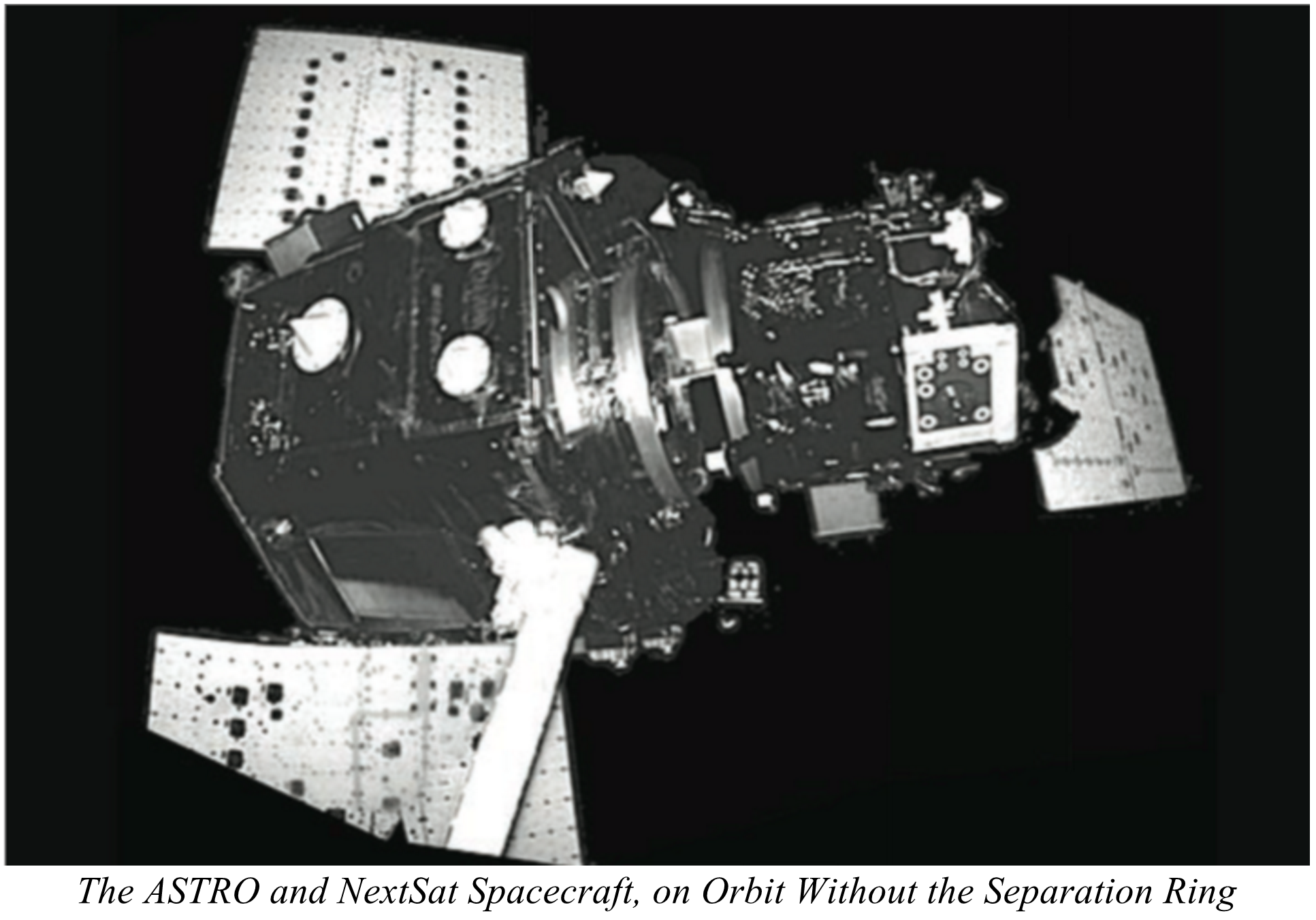
The recent advancements in aerospace GNC have enabled workflows that were termed inconceivable earlier. The ability to control dispersions throughout Falcon 9 first stage flight is a prime reason that enabled SpaceX to achieve an autonomous precision landing[2]. Moreover, recent anomalies with the Nauka module’s autonomous docking system and subsequent loss of attitude control of the ISS for a brief period reinforce the importance of robust autonomy during proximity operations[3]. In addition, heavily researched workflows such as on-orbit satellite servicing and active debris mitigation have the potential to enable efficient utilization of low earth orbital environment. Consequently, I focused my doctoral studies on spacecraft GNC pertaining to pose estimation, sensor fusion and proximity operations.
I believe that the current state-of-the-art spacecraft motion emulation facilities result from colossal capital investment and are mainly funded / operated by government agencies. Usually, such facilities are not in reach for smaller private companies and academia.
However, due to advancements of CubeSat technology, increased proximity operations, miniaturization of electronics, and powerful actuators, there is a need for accessible and low-cost spacecraft motion emulators that can provide a true 6-DOF gravity compensated test environment. I believe that my previous knowledge of instrumentation, robotics, controls, embedded systems, large-scale system design, and the V-model of system development will enable me to efficiently design, maintain and utilize spacecraft motion emulation platforms.
A few academic laboratories with Satelite Motion Emulators:
Department of Aerospace Engineering, Texas A&M University.
Enhanced autonomy in Free-Flyer robots
A NASA report on fatigue in ISS crew members states that crewmembers spend a considerable amount of time performing inspections and routine maintenance of ISS. In this area, automation could substantially reduce the frustration of crewmembers regarding wasting valuable time in orbit.
I want to apply my previous experience with robotics, control, and space proximity operations to devise algorithms, design various experiments and build flight hardware to enhance spacecraft autonomy so that the routine maintenance tasks can be handed over to space robots.
Efficient and widespread utilization of analytical research into real-world applications
I aspire to become a research professional in academia and gradually build an ecosystem where various government and private agencies can partner with the institution for efficient and widespread utilization of analytical research and lab-scale prototypes into real-world applications. Attending the prestigious Doctorate’s program would grant me an opportunity to collaborate with leading researchers on projects ranging from conceptual design to final flight hardware validation for various space missions.